

このたびの大震災により犠牲になられた方々とご遺族の皆様に謹んでお悔やみ申し上げますと共に、被害にあわれた皆様に心よりお見舞い申し上げ、一日も早い復興をお祈りいたします。
今回もM232Raycraftのソフトウエアに関して紹介します。前回はエンジンブレ
ーキ(ストレート編)でしたが今回はエンジンブレーキ(ターンイン編)ということで
進めていきたいと思います。
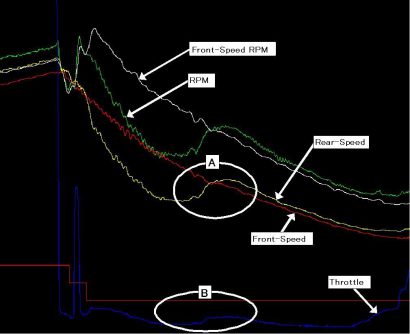
上記のグラフはMOTEGIのあるストレート後の減速を表したものです。車両は
GSXR1000で、スタンダードで採用されているエンジンブレーキコントロール
システムを汎用のECUで制御しています。この場合の制御といってもレースキット
のEM-PROと同じようなロジックで制御しており特別なことは行っていません。
しかしながらエンジンブレーキコントロールと密接な関係をもつセカンダリスロッ
トルのセッティングはEM-PROとは異なるパターンを用いています。
ここで注目したいのはダウンシフト直後から発生しているスキッドがターンイン開始
付近(A付近)まで続いておりそれに伴ってエンジン回転数も袋状の下降上昇のパ
ターンとなっています。ここでのエンジン回転数の急下降と急上昇はどの様な現
象なのでしょうか?
まずエンジン回転数の急下降はリアタイヤのハーフロックが激しい状態であ
ることを意味します。次にエンジン回転数の急上昇はターンイン時に発生するサイド
フォースの上昇によるリアタイヤのグリップ回復とバンクすることによるリアタイヤの
接地外周の減少による効果の複合作用でリヤスピードが見かけ上ではあるが上
昇することにより発生する現象です。(クラッチが滑っていなければエンジン回転
数の上昇とリアスピードの上昇は正比例します。)
ここで大きな問題となるのはターンイン開始直後のエンジン回転数の急上昇と
その区間(B付近)でのスロットル開度とその変化パターンです。具体的には
減速がターンイン手前で終了するようなレーシングビギナーは別として、一般的
なレーシングライダーであればターンイン開始直後から適度な安定したエンジン
ブレーキを必要とし、そのエンジンブレーキはクリップに近づくにつれ自然と減衰
していく様な特性を望むのではないでしょうか?
しかしながら上記グラフではターンイン直後にライダーの意思とは別にスロットル
グリップが全閉であるにもかかわらずスロットルが静的に設定した開度よりも
開いていたり、場合によってはスロットル開度が上昇することもあるという点です。
実際上記のグラフでもB付近のスロットル開度の変化を注意して見て頂きたいの
です。ここではスロットル開度がライダーの意思とは別にターンイン直後に約3%
から5.5%まで変化しています。これではバイクは曲がらなかったり、ハンドルが
切れ込んだりといったネガが短い期間に複合的に発生します。
この現象は傾向的にはGSXRやZXRといったセカンダリースロットル開度とエン
ジンブレーキコントロールをリンクさせている機種に多く見られます。これはエン
ジンブレーキをコントロールするための可変のスロットル全閉位置の制御がエン
ジン回転数の関数になっているからなのです。
簡単に言えばエンジンブレーキコントロールが必要な領域でGSXRやZXRは
「エンジン回転数が高ければスロットルの全閉開度は高く、エンジン回転数が
低ければスロットルの全閉開度は低い」といったようなセットが「定性的」に行わ
れているからです。
もっと簡単に言えばリヤタイヤがハーフロックしてエンジン回転数が低下す
ればスロットル開度がより閉まる傾向になりエンジンブレーキが強くなり、ますます
ハーフロックが悪化し、ターンインでリヤタイヤの接地外周が小さくなりエンジン回
転数が上昇すればスロットル開度がより開く傾向になりエンジンブレーキが弱くなり
ますます走行ラインが外側にシフトするといったデススパイラルに突入していきます。
ここで考え方を変えてエンジンブレーキコントロールのスロットル全閉位置の制御を
エンジン回転数の関数ではなくフロントスピード相当の仮想エンジン回転数の関数
とすれば(上記グラフのFront-Speed RPM)減速中に大きなスキッドが発生し
ても対応可能であり、またターンイン時にリヤスピードがフロントスピードを追い越す
様なエンジン回転数の上昇があっても逆にFront-Speed RPMは通常のエンジ
ン回転数よりも低い値になるため自動的にスロットル全閉位置が低下しエンジンブ
レーキが強化されることになります。
このFront-Speed RPMの概念はM232Rに折り込まれておりまたエンジンブレ
ーキコントロールのタイプもGSXRやZXRのようなステッパーモーターをポジション
フィードバックで活用するタイプもDUCATI-1098R/1198Rのようなオープン
ループでタイプステッパーモータを活用するタイプも両方対応可能となっているので
興味のある個人やチームはぜひ試して欲しいと思います。
またこのM232Rは外部からCAN経由で燃料補正ゲイン、点火オフセット、失火率
を各気筒ごとにコントロール可能であり、また同様にエンジンブレーキ用のステッパ
ーモータのステップ数やセカンダリスロットルの開度をCAN経由でコントロール可能
なのでMoTeCのADLや2DのCALC-MODULEを使用すればオリジナルの色々
なストラトジーの構築が可能です。このECUはプライベーターだけではなくファクト
リーチームの先行テストにも十分活用できるのではないでしょうか。
このECUはMarelliの中でも最も小さなフルコンです。
しかしながら内容はTC以外の基本機能は上位モデルと同様です。
TCに関してもセットしやすい進角を補正するタイプが装備されています。
ここでSRB120に含まれる基本機能を紹介します。
1)燃料マップ(RPM X TP X 2ポジション)
2)進角マップ(RPM X TP X 2ポジション)
3)基本補正 : 始動補正・水温補正・吸気温補正
大気圧補正・加減速補正
3)シリンダー補正 燃料・点火共にRPMのみ
3)使用可能インジェクタ 2本
4)使用可能イグニッションコイル 2個
5)1chA/F計測用アンプ内蔵
センサーは別売り
使用可能センサ : NGK LZA03 LZA08
Bosch LSU4.2 LSU4.0
5)レース用機能
6)価格
¥128,000(税別) ---------基本ソフトウエア含む
他に¥39,800(税別)の専用通信ケーブル(CAN)が必要です。
このECUは2気筒までのエンジンに使用可能です。
特にシングルシリンダーエンジンで使用するのであれば本格的なレース用ECUとなります。
また2気筒であっても並列2気筒であれば気筒間の補正はあまり必要ではないので1chA/Fフィードバックコントロールが有効です。
もしMarelliのECUに興味がありMarelliソフトを覚えてみようとするユーザーには最適なECUではないでしょうか?
アプリケーションとしてはミニモト、レース用スクータ(T-Maxなど)、GP-MONOまたGP3用の車両を製作しているチームにもお勧めのECUです。
A/Fアンプやシフターを別に購入することを考えればこの価格はかなりリーズナブルではないでしょうか。
適応エンジンに関しては別途お問い合わせ下さい。
あけましておめでとうございます。今年もよろしくお願いいたします。
早速ですが昨年の暮れに2DとMicrotecに出張しいろいろな話し合いをしました。
まずはMicrotecの2011年新製品に関してですが
1)M227MV MV-Agusuta F4
(2010年モデル対応 1月末に発売 予約受付中)価格¥248,000
2)M227AP Aprilia RSV4
(2010年モデル対応 3月末に発売 予約受付中)価格¥248,000
(レースユーザー対象キャンペーン企画あり)
3)MxxxCBR HONDA CBR1000/600
(現行CBR1000/600に対応 3月末に発売) 価格 近日発表
(レースユーザー対象キャンペーン企画あり)
4)M248 NEWレースECU
Dual-DBW、Dual-LambdaControl、Dual-KnockControl、TC
価格 近日発表
5)M232R FWバージョンアップ
A)外部CANモジュール入力可能
MoTeC ADL、2D-CALC などとの組み合わせでユーザー定義による
トラクションコントロール、アンチウイリー、エンジンブレーキコントロールなど
のオリジナルストラトジー設定可能
外部コマンド : Fuel Comp Gain each Cyl , IG Comp Offset each Cyl
Stepper Step Offset , Aux Throttle Target Offset
B)フロント・リアサスストロークセンサ信号入力ch追加
C)フロントスピード信号デジタル/CAN選択可能
D)FrontSpeed-RPM使用時のフェールセーフロジック変更(エンジンブレー
キコントロール)
ECUワンポイントアドバイス
マイクロテックのECUはフルコンです。サブコンではありません。したがってサブ
コンよりは少し取り扱いが難しいです。しかしながら一般的なユーザーが調整し
なければならない項目はほぼ限られています。またサブコンの様に扱いたいの
であればベースマップを気にせず調整したいエンジン回転数とスロットル開度
のポイントを±パーセントで調整することも可能です。また2010年以降の
MV-F4のようなツインインジェクタであっても燃料を増量したり減量したり上
下インジェクタの分配比率をかえるための操作はスロットル開度やエンジン回
転数を気にせず変えたいポイントを±するだけでサブコンのようなわずらわしさ
はありません。このように考えるとフルコンも正しく付き合えば難しくはないのです。
また何よりフルコンが良い点はセッティングの変化を確実に体感できることでは
ないでしょうか。フルコンはサブコンのように不明なベースマップを気にしたり開示
されていない制御にセッティングを邪魔されることはないのです。ちなみにマイク
ロテックのほとんどのプラグインECUはSTD車両のラムダセンサを使用してラム
ダ=1(制御領域設定可能)運転も可能です。
つぎに2Dの2011年新製品に関してですが
1)CANロガーLite
このロガーはマイクロテックやマレリといったエンジン回転数やスロットル開度など
のデータをCANで出力しているECUとの組み合わせで使用するCANロガーです。
このロガーには2Dの得意分野であるGPSが含まれておりバンクアングルやコーナ
ーでの実速度が計測可能となります。またラップタイム計測もGPSによるものです。
またこのラップタイムを各車両のスタンダードメーターに表示するためのデジタル
アウトプットも装備されます。
計測可能チャンネル数とメモリー容量
タイプ1がCAN32ch+GPS10ch16MB
タイプ2がCAN64ch+GPS10ch32MB
となっており入門用ロガーとしては十分なスペックです。
価格はタイプ1が¥128,000税別(予価)、タイプ2が¥168,000税別(予価)
対応ECU 1)すべてのマイクロテックECU 2)すべてのマレリECU
3)Nemesis 1/2 4)MoTeC M400/600/800
4)EFI Euro2/4/6/12
その他のECUに関してはお問い合わせ願います。
2)スモール・エンジンインターフェース
この商品は上記CANロガーLiteと組み合わせで使用するインターフェースBOX
で汎用信号(アナログ・デジタル)をCAN信号に変換しCAN出力を持たない車両
でのロギングを可能とするものです。またこのBOXはCAN出力ありのECUと組
み合わせで使用する場合であっても追加でアナログ信号、デジタル信号が計測
したい場合にも有効です。このBOXの仕様は
タイプ1 A/F 1ch のみ サンプリングレート50Hz 価格 近日発表
タイプ2 アナログ4ch/デジタル2ch/A/F1ch サンプリングレート50Hz
価格 近日発表
タイプ3 アナログ4ch/デジタル2ch/A/F1ch サンプリングレート200Hz
価格 近日発表
使用例:フロントサスストローク、リアサスストローク
スロットル、フロントブレーキプレッシャー
アナログ4ch
エンジン回転数、スピード———————- デジタル2ch
A/F———————— A/F 1ch
これらの商品はCANデータ出力可能なECUをすでにもっているユーザーで
あればCANロガーLiteの購入のみで相当な計測と解析が可能となります。
現在国内で販売されている10~20万円クラスの中では対等に比較できる
商品はありません。これは操作が難しくなったり、理解できない解析画面が出
てくるという意味ではありません。2Dはユーザーが直感的にやりたいことを自
動的に表示するアイコンがほとんどの場合必ず存在します。ユーザーはやりた
いこととそれをやるためのアイコンをおぼえればほとんどの作業がワンクリック
で可能です。付属のソフトはMOTO2などで使用されているソフトウエアに近い
バージョンであり通常の解析およびデータチェックには全く問題はありません。
また今まで別なメーカーのデータロガーやそれに付属していたソフトウエアを
使用していたユーザーが2Dを知れば今までのデータロガーシステムの大きな
違いに気づかれるはずです。なぜならこのソフトに含まれている機能のほとんど
がMoToGPで普通に使われている重要な基本ファンクションだからです。
従ってこのソフトウエアにもMoToGPで鍛えられたデータロガーに求められる
”Speed & Power”の即戦力の基礎が備わっています。ぜひお試し下さい。
